Software Programming
The driver controls are based around a Texas Instruments (TI) MSP430 16-bit embedded low-power microcontroller, operating from a 16 MHz clock as default. CAN bus support is provided via a Microchip MCP2515 CAN controller and TI SN65HVD234 CAN transceiver. The driver controls are not isolated from the CAN bus.
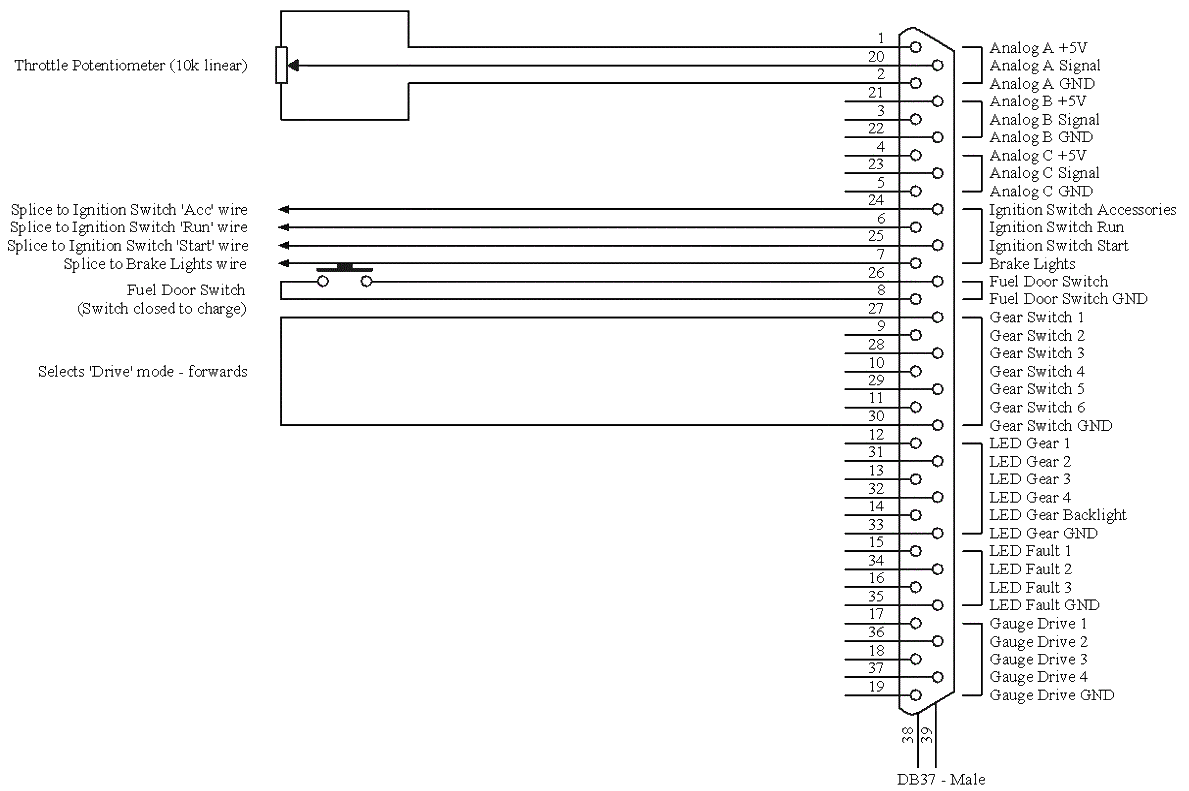
Basic Software Connection Diagram
The following schematic shows the simplest possible connection, when using the default software.
Schematics & Source Code
Schematics and PCB component position overlays in PDF format are available for download on the Prohelion website. A zip file is also provided containing the default source code for the microcontroller, written in 'C' and available under a BSD open-source license.
Please refer to these references if developing custom firmware for the driver controls.
Toolchain
The example default code provided is configured to work with the freely-available open-source MSP430 GCC toolchain, which provides a command-line driven compiler, binutils, download, and real-time debug capability through a JTAG header present on the driver controls PCB. The debug functionality requires purchase of a USB programmer from Texas Instruments. Please refer to the README file with the source code for download and installation instructions.
Code Download
The EV Driver Controls contains a facility to load new software into the device via the CAN bus. This works in conjunction with our CAN-Ethernet bridge. The bootloader utility is available on the Prohelion website. Using this method of programming means that a debugger is not possible, but it works immediately and does not require the purchase of additional hardware.